


















Hélice subacuática APISQUEEN U2 MINI 1,3Kg 16V 130W
Guía del usuario del propulsor subacuático U2 Mini (con y sin ESC):
Acerca de los puntos (esquina inferior derecha de la página de la tienda):
★Gane 5 puntos por cada $1 gastado;
★Gane $1.00 de descuento en todo su pedido por cada 100 puntos canjeados;
Aplicable a pedidos de cualquier importe.
Cómo utilizar los puntos:
1. Canjee puntos en el panel de sonrisas.
2. Canjee puntos al finalizar la compra.


Modelo: U2 mini
Entorno de uso U2mini: agua de mar/agua dulce
Voltaje: 12-16V (batería de litio 3-4S)
máximo. Corriente: 8A
Potencia máxima: 130W
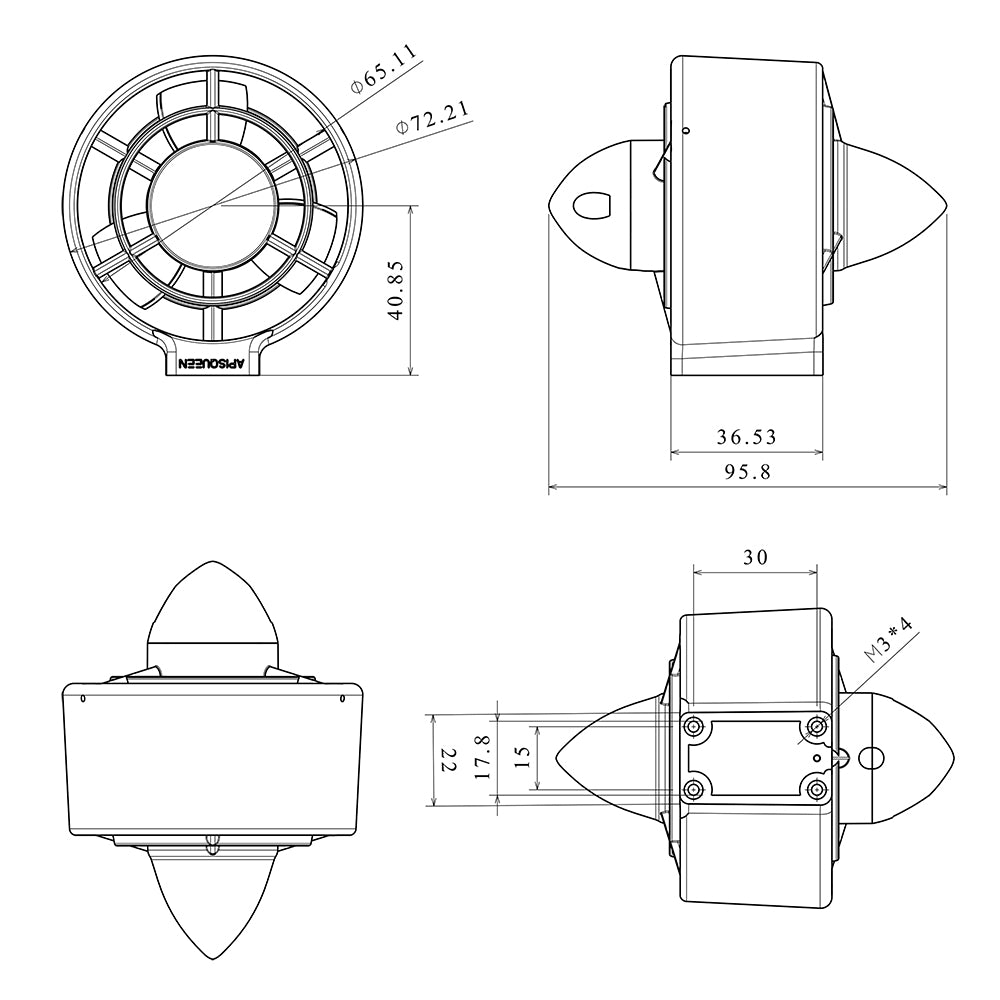
Tamaño: 95,8*77mm
Longitud del cable:>900 mm
Peso: 210 g
Diámetro del alambre: 7 mm
Modulación de ancho de pulso: 1-2 ms, 50 HZ
Descarga de dibujo 3D de propulsión submarina APISQUEEN U2 Mini
característica:
1: La mini hélice submarina sin escobillas U2 está moldeada en una sola pieza, hecha de materiales compuestos, anticorrosión y antioxidante, y se puede utilizar en entornos de agua de mar.
2: U2 mini tiene bajo consumo de energía y alta eficiencia.
3: Las mini nervaduras protectoras delanteras y traseras U2 pueden evitar eficazmente la entrada de objetos extraños.
4: Usando motor 500KV, alta velocidad.
5: Soporta hasta 16V (4S LiPo).
Descripción de propulsión submarina CW y CCW
¿Cómo enviar señal PWM al ESC usando Raspberry Pi 4B para controlar propulsores submarinos?
Código de muestra:
Importar cerdito
Hora de importación
pi = pigpio.pi() #Crear objeto pigpio
LED_PIN = 18 # Defina el puerto GPIO al que está conectado el LED.
PWM_FREQUENCY = 50 #Definir frecuencia PWM, unidad Hz
Rango de modulación de ancho de pulso = 1000
PWM_DUTYCYCLE = 0 # Definir ciclo de trabajo PWM, rango de valores 0 (2) 55,
pi.set_mode(LED_PIN, pigpio.OUTPUT) #Configura el puerto GPIO en modo de salida
pi.set_PWM_Frequency(LED_PIN, PWM_FREQUENCY) #Establecer frecuencia PWM
pi.set_PWM_range(LED_PIN, PWM_range) # Establecer rango 1000
pi.set_PWM_dutycycle(LED_PIN, 75) #Establecer ciclo de trabajo PWM 75/1000=7,5%
time.sleep(3) # Retrasa 3 segundos para desbloquear con éxito
pi.set_PWM_dutycycle(LED_PIN, 100)
#Rotación hacia adelante 7,5% -10% del ciclo de trabajo, cuanto mayor sea el ciclo de trabajo, más rápida será la velocidad de rotación hacia adelante
tiempo.dormir(15)
pi.set_PWM_dutycycle(LED_PIN, 60)
# Marcha atrás Cuanto más cerca esté el ciclo de trabajo del 5%, más rápida será la velocidad de marcha atrás.
tiempo.dormir(5)
pi.set_PWM_dutycycle(LED_PIN, 75)
#Ciclo de trabajo
tiempo.dormir(5)

Preguntas frecuentes:
Acerca de la personalización
Los servicios de personalización incluyen: personalización de propulsores, motores y ESC en todos los aspectos;
Si tiene alguna necesidad de personalización, comuníquese con APISQUEEN (lynn@underwaterthruster.com).
Acerca de las tarifas
Los precios de los productos y los gastos de envío no incluyen los aranceles, que se cobran de manera diferente en cada país. Los compradores deben pagar los aranceles al recibir los productos (por ejemplo, la política arancelaria regional de EE. UU.: no hay aranceles para pedidos de hasta 800 dólares estadounidenses).
1. Las importaciones internacionales de algunos países/regiones pueden requerir despacho de aduana de materiales específicos (si es necesario, proporcionaremos a los clientes una factura proforma).
2. Si la mercancía se devuelve porque el cliente no coopera con el despacho de aduana, el flete correrá a cargo del destinatario.
3. Podemos proporcionar listas de consumo y certificados. Comuníquese con nosotros si lo requiere la aduana.
4. Si el producto se devuelve por motivos del comprador, el comprador correrá con los gastos de envío y el coste dependerá del envío urgente elegido. Si los productos están dañados o incorrectos debido a nuestra culpa, APISQUEEN correrá con todos los costos.
5. El valor del producto que declaramos en la aduana es el 10% del importe del pedido realmente pagado por el comprador, por lo que el comprador generalmente paga muy pocos derechos de aduana.
Acerca de la entrega
¡Podemos realizar envíos a casi cualquier país del mundo! Sin embargo, existen restricciones a la importación en algunos países que es necesario tener en cuenta.
En caso de stock: la mercancía se enviará dentro de 1-3 días hábiles después del pago del comprador.
En caso de falta de stock: los productos se enviarán dentro de 3 a 20 días hábiles después del pago del comprador.
1. Puede haber otros problemas que provoquen retrasos en la entrega, como información de dirección que necesite mayor verificación, etc. Pero tenga la seguridad de que haremos un seguimiento a tiempo para enviar los productos más rápido.
2. Las mercancías generalmente se transportan por vía aérea. Utilizamos diferentes métodos de transporte según la ubicación del comprador. Generalmente utilizamos DHL, FedEx, UPS, líneas dedicadas, etc.
3. El tiempo de entrega urgente estándar al destino es generalmente de 3 a 12 días (sin otras circunstancias especiales), y el tiempo de entrega a países/regiones remotas es generalmente de 10 a 20 días. Si tiene otras necesidades (como entrega urgente designada, declaración de valor en aduana, etc.), comuníquese con nosotros después de realizar el pedido para asegurarnos de que podamos cumplir con sus requisitos.
4. APISQUEEN establece tarifas de envío según los diferentes países/regiones. Para reducir los costos de compra de los compradores, APISQUEEN toma la iniciativa de asumir el 50% de los costos de envío para los compradores.
5. El costo del transporte se cobra según el peso de la mercancía y se liquida al realizar el pedido. El flete mostrado en la liquidación es resultado de que APISQUEEN se haga cargo del 50%.
6. Puede estimar el costo de envío de la siguiente manera: Seleccione el artículo que desea comprar → Agregar al carrito → Ingrese el código postal de la dirección de envío → Seleccione el método de envío → Luego recibirá el costo de envío estimado.
7. Si necesita el producto con urgencia, contáctenos antes de realizar un pedido para asegurarnos de que podamos cumplir con sus requisitos de tiempo.
Sobre posventa
1. Los pedidos se pueden cancelar antes de que se envíe el producto para obtener un reembolso completo (incluidos los costos de envío). Después de enviar la mercancía, si el comprador solicita un reembolso por sus propios motivos (por ejemplo: no lo quiere, compró el producto equivocado, etc.), el comprador debe hacerse cargo del costo de la entrega urgente y devolver la mercancía. A nosotros. Recibiremos los productos devueltos. Posteriormente, se le reembolsará al comprador.
2. Si descubre que su paquete está dañado durante el transporte, comuníquese con nosotros (Lynn@underwaterthruster.com) dentro de los 5 días posteriores a la recepción de los productos y proporcione fotos o videos de los productos. Le responderemos dentro de 1 a 3 días. Se lo enviaremos en un plazo de días laborables según la situación real para su satisfacción.
3. Si necesita reemplazar los productos comprados después de recibirlos, debe enviarlos por correo a APISQUEEN;
Si hay algún problema de calidad con el producto dentro de los 6 meses posteriores a la compra del producto y se confirma el recibo, brindaremos un servicio posventa gratuito y enviaremos por correo nuevos accesorios o nuevos productos al comprador de forma gratuita (el comprador solo debe hacerse cargo los costos de transporte expreso), APISQUEEN ya no ayuda a los compradores a hacerse cargo del 50% de los costos de envío y requiere que los compradores asuman el 100% de los costos de envío)
APISQUEEN rechaza el servicio postventa en las siguientes circunstancias:
1. Fallas y daños no causados por problemas de calidad del producto.
2. Daños causados por modificación del circuito o coincidencia inadecuada.
3. Daños causados por modificaciones o desmontajes no autorizados.
4. Daños causados por instalación o uso inadecuado.
5. No limpiar con agua dulce a tiempo después de su uso en agua de mar acortará la vida útil del producto.
Todos los productos "no serán devueltos ni cambiados a menos que haya problemas de calidad". Al comprar nuestros productos usted acepta esta política.
Customer Reviews
APISQUEEN U2 MINI 1.3Kg Underwater Thruster 16V 130W
APISQUEEN U2 MINI 1.3Kg Underwater Thruster 16V 130W
you mom
I ordered U2 mini with built in esc, that should run at max speed as soon as I connect it to battery, but it does NOT!
I received two units that have to be speed controlled, so I had to program arduino, buy different cables and it is the opposite of simplicity, that I wanted. So I had to delay my project and I cannot write a review how they perform in water.
I am a Swiss High-Scool Student and as my final project, i built a ROV. For this Purpose I ordered 4 of the U2 Mini Thrusters and they worked Very well and have a lot of Thrust. (Even too much for me, i had to power them with a lower pwm Signal than the Maximum)
Also the Quality of the Product seems very good and I'm Happy with the Product (Despite they where quite expensive for my Budget.)
First I didn't know whether I could thrust the website of Apisqueen, so after a short Chat with Apisqueen, I ordered the Thrusters on Aliexpress where I have some Inscurances and a Money Back Guarantee. But If I had to buy a second time, I would buy them directly from the Apisqueen website.

