














Contrôleur électronique de vitesse (ESC) APISQUEEN 24 V 100 A Feather, boîtier métallique avec ventilateur intégré et BEC 5,5 V 3 A pour propulseurs et moteurs sous-marins
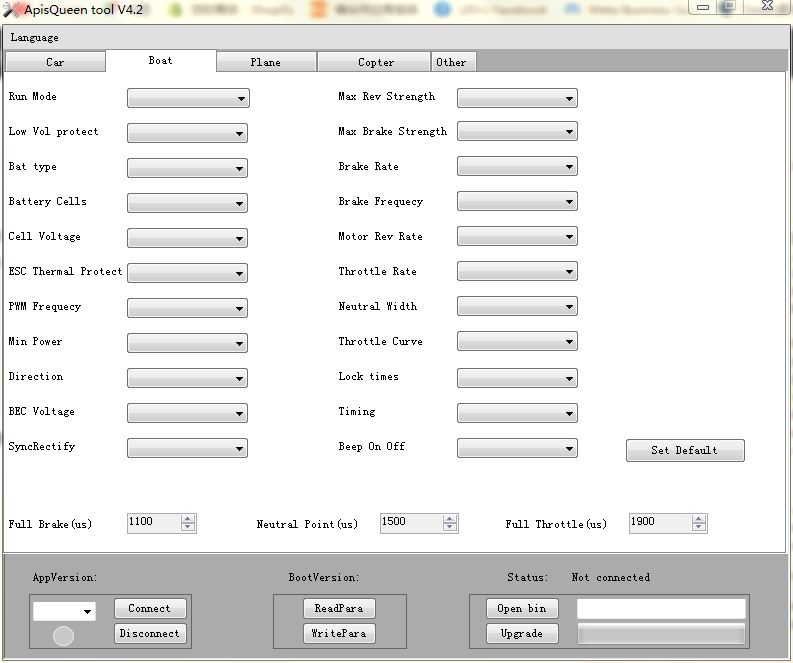
Méthode de connexion du logiciel de la carte de référence et description des paramètres :
Tension supportée : 24 V (maximum : 29,2 V)
Poids : 230 g
Courant continu : 100 A
Mode de fonctionnement : bidirectionnel
BEC : 5,5 V 3 A
1. Protections multiples : protection contre les basses tensions, les surchauffes, le décrochage, etc.
2. Micrologiciel exclusif APISQUEEN, plus performant : la réponse de décélération du propulseur est plus rapide lorsque la manette des gaz passe de grande à petite.
3. La stabilité et la flexibilité du propulseur sont considérablement améliorées, et le signal de la manette des gaz est automatiquement détecté après la mise sous tension du contrôleur.
4. Prise en charge du mode de commande des gaz PWM standard, entrée Oneshot et Multishot avec une largeur d'impulsion de 1 à 2 ms. Compatible avec les moteurs Dshot150, Dshot300 et Dshot600. Dshot est un signal numérique.
5. Forte capacité anti-interférences : le contrôleur ne nécessite pas de calibrage du signal de course de l'accélérateur.
6. Logiciel professionnel de paramétrage informatique, visualisation des paramètres.
7. Le contrôleur utilise une coque métallique et un ventilateur intégré pour une dissipation thermique efficace, garantissant un fonctionnement stable et des performances optimales.
Lien de téléchargement du logiciel (cliquez sur le lien pour le télécharger) : https://cdn.shopifycdn.net/s/files/1/0621/5493/2452/files/ApisQueen_tool.zip?v=1677690776
Si vous ne trouvez pas le port COM, vous devez télécharger et installer le pilote Ch340 ou Ch341. Connectez l'ordinateur et le câble de signal du contrôleur via USB, cliquez sur « Outils », sélectionnez « Port COM », cliquez sur « Connecter », puis allumez le contrôleur. Après avoir vérifié la connexion, cliquez sur « Readpara » pour lire les paramètres, modifier les paramètres correspondants, puis sur « Writepara » pour les écrire et les enregistrer.
À propos de la modulation de largeur d'impulsion (PWM)
PWM signifie (Pulse-Width Modulation). Également appelé signal de rapport cyclique, il indique la proportion de la durée du niveau haut par rapport au cycle complet du signal. Le rapport cyclique PWM est de 2 ms, 1,5 ms pour l'arrêt, 1,5-2 ms pour le sens de rotation et 1,5-1 ms pour le sens de rotation inverse.
La figure montre clairement qu'à 75 % de la PWM (1,5 ms), le moteur s'arrête ; à 50 % de la PWM (1 ms), le moteur s'inverse ; à 100 % de la PWM (2 ms), le moteur tourne en sens inverse. Bien entendu, le contrôleur peut non seulement contrôler la rotation avant et arrière du moteur, mais aussi ajuster sa vitesse en fonction du rapport cyclique PWM. Lorsque la MLI passe progressivement de 75 % à 50 %, le moteur continue d'accélérer en marche arrière depuis l'arrêt jusqu'à ce que la vitesse arrière atteigne sa valeur maximale. Lorsque la MLI passe progressivement de 75 % à 100 %, le moteur continue d'accélérer depuis l'arrêt jusqu'à ce que la vitesse avant atteigne sa valeur maximale. Autrement dit, la MLI est un signal variable en continu, dont la plage de variation effective est comprise entre 50 % et 100 %.
La fréquence du signal MLI est de 50 Hz, 100 Hz, 200 Hz ou 500 Hz. Plus la fréquence de commande est élevée, plus le cycle et l'intervalle de commande sont courts, plus la vitesse de réponse du contrôleur et du moteur est rapide. À l'inverse, plus la fréquence de commande est basse, plus le cycle et l'intervalle de commande sont longs, plus la vitesse de réponse du contrôleur et du moteur est lente.