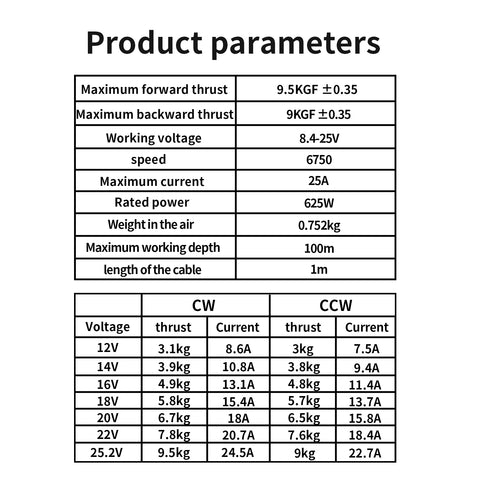
U9 2-6s 25V 600W bawah laut pendorong/pendorong/baling-baling, dirancang dengan kontrol ESC interpolasi untuk ROV/ bot/bot/kapal tak berawak
Kami adalah pabrik asal kami. Pembelian grosir/custom silahkan hubungi kami: llny@news thruster. Com.
U92-6s 25V 600W pendorong bawah air, built-in electric tuning.
Tentang PWM
PWM full name (modulasi lebar pulsa). Yang juga disebut sinyal alpha dan bujur sangkar, adalah periode berlevel tinggi yang membentuk seluruh siklus sinyal. Seluruh siklus PWM 2ms, 1.5ms berhenti 1,5
Dari gambar ini, kita dapat melihat dengan jelas bahwa mesin berhenti berputar ketika PWM 75% (1,5 ms) dan ketika PWM 50% (1ms), motor berputar balik dan ketika PWM 100 persen (2ms). Tentu saja ESC tidak hanya dapat membalikkan arah dan membalikkan arah mesin, tetapi juga dapat mengatur kecepatan gerakan mesin dengan menggunakan ukuran pi. Ketika PWM secara bertahap berubah dari 75% menjadi 50%, motor akan secara terus-menerus berputar balik dan terus berputar dari berhenti hingga pembalikan maksimal. Sementara PWM mengalami perubahan dari 75% secara bertahap menjadi 100% motor terus mempercepat dari stop ke torsi terus menerus sampai maksimum. Bahwa PWM adalah sinyal yang dapat berubah secara terus menerus, dengan kisaran efektif 50-100 persen.
Sinyal PWM memiliki frekuensi 50hz, 100hz, 200hz atau 500hz, dan seterusnya, semakin tinggi frekuensi kontrol, semakin pendek siklus, semakin pendek interval kontrol, semakin cepat listrik medan motor merespons. Semakin cepat listrik dan motor merespons. Sebaliknya, semakin rendah frekuensi kontrol, semakin panjang siklus, semakin panjang interval kontrol, semakin lambat listrik dan motor dapat merespon.
U92-6s 25V 600W pendorong bawah air, built-in electric tuning.
Tentang PWM
PWM full name (modulasi lebar pulsa). Yang juga disebut sinyal alpha dan bujur sangkar, adalah periode berlevel tinggi yang membentuk seluruh siklus sinyal. Seluruh siklus PWM 2ms, 1.5ms berhenti 1,5
Dari gambar ini, kita dapat melihat dengan jelas bahwa mesin berhenti berputar ketika PWM 75% (1,5 ms) dan ketika PWM 50% (1ms), motor berputar balik dan ketika PWM 100 persen (2ms). Tentu saja ESC tidak hanya dapat membalikkan arah dan membalikkan arah mesin, tetapi juga dapat mengatur kecepatan gerakan mesin dengan menggunakan ukuran pi. Ketika PWM secara bertahap berubah dari 75% menjadi 50%, motor akan secara terus-menerus berputar balik dan terus berputar dari berhenti hingga pembalikan maksimal. Sementara PWM mengalami perubahan dari 75% secara bertahap menjadi 100% motor terus mempercepat dari stop ke torsi terus menerus sampai maksimum. Bahwa PWM adalah sinyal yang dapat berubah secara terus menerus, dengan kisaran efektif 50-100 persen.
Sinyal PWM memiliki frekuensi 50hz, 100hz, 200hz atau 500hz, dan seterusnya, semakin tinggi frekuensi kontrol, semakin pendek siklus, semakin pendek interval kontrol, semakin cepat listrik medan motor merespons. Semakin cepat listrik dan motor merespons. Sebaliknya, semakin rendah frekuensi kontrol, semakin panjang siklus, semakin panjang interval kontrol, semakin lambat listrik dan motor dapat merespon.