




















Elica subacquea APISQUEEN U2 MINI 1.3Kg 16V 130W
Modello:U2mini
Voltaggio: 12-16 V (LiPo 3-4S)
Massimo. Corrente:8
Potenza massima: 130 W
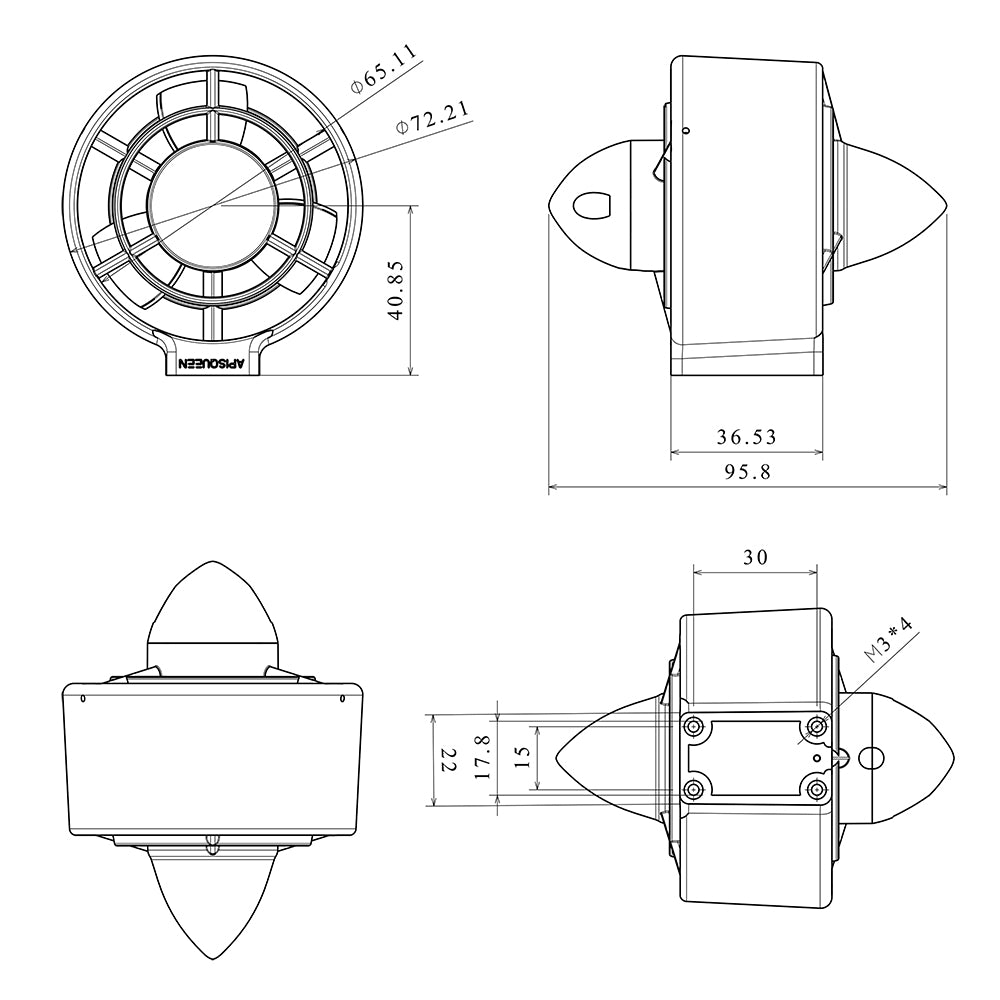
Dimensioni: 95,8 x 77 mm
Lunghezza del cavo: ﹥900 mm
Peso: 210 g
Diametro del filo: 7 mm
PWM: 1-2 ms, 50 Hz
Caratteristiche:
1: Il propulsore subacqueo senza spazzole in miniatura U2 è un'apertura dello stampo integrata, realizzata in materiali compositi, anticorrosione e antiossidante e può essere utilizzata in ambienti con acqua di mare.
2: U2 mini ha un basso consumo energetico e un'alta efficienza.
3: Le mini nervature protettive anteriori e posteriori U2 possono impedire efficacemente l'ingresso di oggetti estranei.
4: Utilizzo del motore da 500 KV ad alta velocità.
5:Supporta fino a 16 V (LiPo 4S).
Codice d'esempio:
importare pigpio
Ora di importazione
PI = pigpio.PI() #Crea oggetto pigpio
LED_PIN = 18 #Definisce la porta GPIO a cui è collegato il LED.
PWM_FREQUENCY = 50 #Definisci la frequenza PWM (Hz)
Intervallo_PWM = 1000
Definire il ciclo di lavoro PWM, l'intervallo di valori è 0 (2) 55,
π. set_mode(LED_PIN, pigpio.OUTPUT) #Imposta la porta GPIO sulla modalità di output
π. set_PWM_frequency(LED_PIN, PWM_FREQUENCY) #Imposta la frequenza PWM
π. set_PWM_range(LED_PIN, PWM_range) #Imposta l'intervallo 1000
π. set_pwm_duty cycle (LED_PIN, 75) #Imposta ciclo di lavoro PWM 75/1000= 7,5%
Time.sleep(3) #Ritarda 3 secondi per sbloccare correttamente
π. set_PWM_dutycycle (LED_PIN, 100)
#Rotazione in avanti Ciclo di lavoro 7,5%-10%, maggiore è il ciclo di lavoro, maggiore è la velocità di avanzamento
tempo.sonno(15)
π. set_PWM_dutycycle (LED_PIN 60)
Quanto più il ciclo di lavoro si avvicina al 5%, tanto più veloce è la velocità di inversione
tempo.sonno(5)
π. set_PWM_dutycycle (LED_PIN, 75)
#ciclo di lavoro
tempo.sonno(5)

Customer Reviews
Based on 1 review
100%
(1)
0%
(0)
0%
(0)
0%
(0)
0%
(0)
F
I am a Swiss High-Scool Student and as my final project, i built a ROV. For this Purpose I ordered 4 of the U2 Mini Thrusters and they worked Very well and have a lot of Thrust. (Even too much for me, i had to power them with a lower pwm Signal than the Maximum)
Also the Quality of the Product seems very good and I'm Happy with the Product (Despite they where quite expensive for my Budget.)
First I didn't know whether I could thrust the website of Apisqueen, so after a short Chat with Apisqueen, I ordered the Thrusters on Aliexpress where I have some Inscurances and a Money Back Guarantee. But If I had to buy a second time, I would buy them directly from the Apisqueen website.

