


















Hélice sous-marine APISQUEEN U2 MINI 1,3Kg 16V 130W
Guide d'utilisation du mini propulseur sous-marin U2 (avec et sans ESC) :
À propos des points (coin inférieur droit de la page du magasin) :
★Gagnez 5 points pour chaque dollar dépensé ;
★Pour chaque tranche de 100 points échangés, vous pouvez gagner 1,00 $ US pour la totalité de la commande ;
Applicable aux commandes de tout montant.
Comment utiliser les points :
1. Échangez des points sur le Smile Board.
2. Échangez des points à la caisse.


Modèle : U2 mini
Environnement d'utilisation U2mini : eau de mer/eau douce
Tension : 12-16 V (batterie au lithium 3-4S).
maximum. Courant : 8A
Puissance maximale : 130W
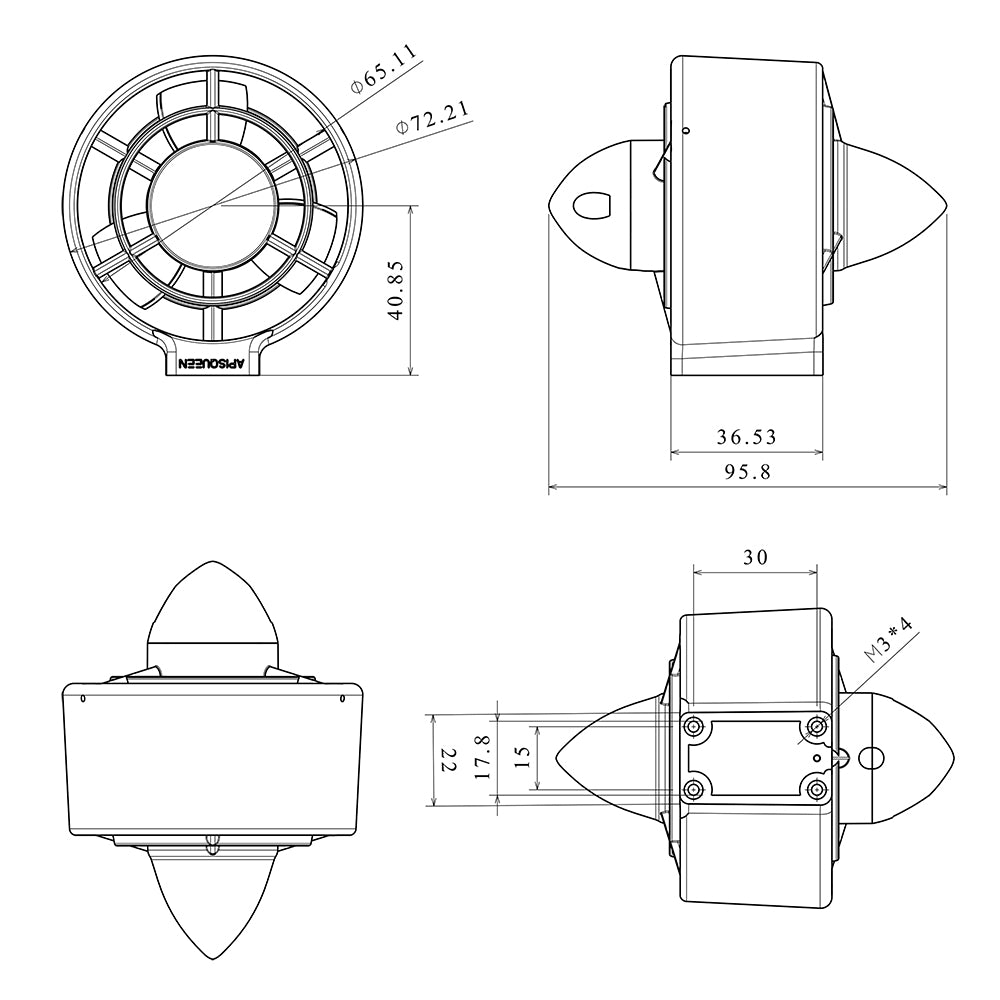
Taille: 95,8*77mm
Longueur du câble :>900 mm
Poids : 210g
Diamètre du fil : 7 mm
Modulation de largeur d'impulsion : 1-2 ms, 50 HZ
APISQUEEN U2 Mini Propulsion sous-marine Dessin 3D à télécharger
fonctionnalité:
1 : La mini hélice sous-marine sans balais U2 est moulée en une seule pièce, faite de matériaux composites, anti-corrosion et anti-oxydation, et peut être utilisée dans les environnements d'eau de mer.
2 : U2 mini a une faible consommation d’énergie et un rendement élevé.
3 : les mini nervures de protection avant et arrière U2 peuvent empêcher efficacement les objets étrangers de pénétrer.
4 : Utilisation d’un moteur 500KV, haute vitesse.
5 : Prend en charge jusqu'à 16 V (LiPo 4S).
Description de la propulsion sous-marine CW et CCW :
Comment envoyer un signal PWM à l'ESC à l'aide du Raspberry Pi 4B pour contrôler les propulseurs sous-marins ?
Exemple de code :
Importer un cochon
Heure d'importation
pi = pigpio.pi() #Créer un objet pigpio
LED_PIN = 18 # Définissez le port GPIO auquel la LED est connectée.
PWM_FREQUENCY = 50 #Définir la fréquence PWM, unité Hz
Plage de modulation de largeur d'impulsion = 1000
PWM_DUTYCYCLE = 0 # Définir le cycle de service PWM, plage de valeurs 0 (2) 55,
pi.set_mode(LED_PIN, pigpio.OUTPUT) #Définissez le port GPIO en mode sortie
pi.set_PWM_Frequency(LED_PIN, PWM_FREQUENCY) #Définir la fréquence PWM
pi.set_PWM_range(LED_PIN, PWM_range) # Définir la plage 1000
pi.set_PWM_dutycycle(LED_PIN, 75) #Définir le cycle de service PWM 75/1000=7,5%
time.sleep(3) # Délai de 3 s pour déverrouiller avec succès
pi.set_PWM_dutycycle(LED_PIN, 100)
# Rotation avant 7,5 % à 10 % du cycle de service, plus le cycle de service est grand, plus la vitesse de rotation vers l'avant est rapide
temps.sommeil(15)
pi.set_PWM_dutycycle(LED_PIN, 60)
# Inversion Plus le rapport cyclique est proche de 5%, plus la vitesse d'inversion sera rapide
temps.sommeil(5)
pi.set_PWM_dutycycle(LED_PIN, 75)
#Cycle de service
temps.sommeil(5)

Questions fréquemment posées:
À propos de la personnalisation
Les services de personnalisation comprennent : la personnalisation des propulseurs, des moteurs et de l'ESC sous tous ses aspects ;
Si vous avez des besoins de personnalisation, veuillez contacter APISQUEEN (lynn@underwaterthruster.com).
À propos des tarifs
Les prix des produits et les frais d'expédition n'incluent pas les tarifs, qui sont facturés différemment dans chaque pays et les acheteurs doivent payer des tarifs lors de la réception des marchandises (par exemple, la politique tarifaire régionale des États-Unis : pas de tarifs pour les achats jusqu'à 800 $).
1. Les importations internationales en provenance de certains pays/régions peuvent nécessiter un dédouanement de matériaux spécifiques (si nécessaire, nous fournirons aux clients une facture pro forma).
2. Si les marchandises sont retournées parce que le client ne coopère pas au dédouanement, le fret sera à la charge du destinataire.
3. Nous pouvons fournir des listes de consommation et des certificats. Veuillez nous contacter si les douanes l'exigent.
4. Si le produit est retourné pour des raisons de l'acheteur, l'acheteur supportera les frais d'expédition et le coût dépendra de la livraison express choisie. Si les marchandises sont endommagées ou erronées du fait de notre faute, APISQUEEN supportera tous les frais.
5. La valeur du produit que nous déclarons à la douane est de 10 % du montant de la commande réellement payé par l'acheteur, donc l'acheteur paie généralement très peu de droits de douane.
À propos de la livraison
Nous pouvons expédier dans presque tous les pays du monde ! Cependant, il existe des restrictions à l’importation dans certains pays dont il convient de tenir compte.
En cas de stock : la marchandise sera expédiée dans un délai de 1 à 3 jours ouvrables après le paiement de l'acheteur.
En cas de rupture de stock : les marchandises seront expédiées dans les 3 à 20 jours ouvrables après le paiement de l'acheteur.
1. Il peut y avoir d'autres problèmes qui entraînent un retard de livraison, tels que des informations d'adresse qui nécessitent une vérification plus approfondie, etc. Mais soyez assuré que nous ferons un suivi à temps pour expédier les marchandises plus rapidement.
2. Les marchandises sont généralement transportées par avion. Nous utilisons différentes méthodes de transport selon l'emplacement de l'acheteur. Généralement, nous utilisons DHL, FedEx, UPS, des lignes dédiées, etc.
3. Le délai de livraison express standard vers la destination est généralement de 3 à 12 jours (sans autres circonstances particulières), et le délai de livraison vers les pays/régions éloignés est généralement de 10 à 20 jours. Si vous avez d'autres besoins (tels qu'une livraison express désignée, une déclaration de valeur en douane, etc.), veuillez nous contacter après avoir passé la commande pour nous assurer que nous pouvons répondre à vos exigences.
4. APISQUEEN fixe les tarifs d'expédition en fonction des différents pays/régions Afin de réduire les coûts d'achat des acheteurs, APISQUEEN prend l'initiative de prendre en charge 50 % des frais d'expédition pour les acheteurs.
5. Les frais de transport sont facturés en fonction du poids de la marchandise et sont réglés au moment de la passation de la commande. Le fret indiqué dans le règlement est à la charge d'APISQUEEN à 50 %.
6. Vous pouvez estimer les frais d'expédition comme suit : Sélectionnez l'article que vous souhaitez acheter → Ajouter au panier → Entrez le code postal de l'adresse de livraison → Sélectionnez le mode d'expédition → Vous recevrez ensuite les frais d'expédition estimés.
7. Si vous avez besoin du produit de toute urgence, veuillez nous contacter avant de passer une commande afin de nous assurer que nous pouvons répondre à vos exigences de temps.
À propos du service après-vente
1. Les commandes peuvent être annulées avant l'expédition du produit pour obtenir un remboursement complet (y compris les frais d'expédition). Après l'expédition des marchandises, si l'acheteur demande un remboursement pour ses propres raisons (par exemple : il n'en veut pas, a acheté le mauvais produit, etc.), l'acheteur doit supporter les frais de livraison express et retourner les marchandises. à nous. Nous recevrons les marchandises retournées. Ensuite, un remboursement sera accordé à l'acheteur.
2. Si vous constatez que votre colis est endommagé pendant le transport, veuillez nous contacter (Lynn@underwaterthruster.com) dans les 5 jours suivant la réception des marchandises et fournir des photos ou des vidéos des marchandises. Nous vous répondrons dans les 1 à 3 jours. pour vous dans les jours ouvrables en fonction de la situation réelle et à votre satisfaction.
3. Si vous devez remplacer vos marchandises achetées après réception des marchandises, vous devez envoyer les marchandises par courrier à APISQUEEN ;
S'il y a un problème de qualité avec le produit dans les 6 mois suivant l'achat du produit et la confirmation de la réception, nous fournirons un service après-vente gratuit et enverrons gratuitement de nouveaux accessoires ou de nouveaux produits à l'acheteur (l'acheteur n'a qu'à supporter les frais de transport express), APISQUEEN n'aide plus les acheteurs à supporter 50% des frais de port, et oblige les acheteurs à supporter 100% des frais de port)
APISQUEEN refuse le service après-vente dans les circonstances suivantes :
1. Défaillances et dommages non causés par des problèmes de qualité du produit.
2. Dommages causés par une modification du circuit ou une mauvaise correspondance.
3. Dommages causés par une modification ou un démontage non autorisé.
4. Dommages causés par une installation ou une utilisation inappropriée.
5. Ne pas nettoyer à temps avec de l'eau douce après une utilisation dans l'eau de mer réduira la durée de vie du produit.
Tous les produits "ne seront ni retournés ni échangés, sauf en cas de problèmes de qualité". En achetant nos produits, vous acceptez cette politique.
Customer Reviews
APISQUEEN U2 MINI 1.3Kg Underwater Thruster 16V 130W
APISQUEEN U2 MINI 1.3Kg Underwater Thruster 16V 130W
you mom
I ordered U2 mini with built in esc, that should run at max speed as soon as I connect it to battery, but it does NOT!
I received two units that have to be speed controlled, so I had to program arduino, buy different cables and it is the opposite of simplicity, that I wanted. So I had to delay my project and I cannot write a review how they perform in water.
I am a Swiss High-Scool Student and as my final project, i built a ROV. For this Purpose I ordered 4 of the U2 Mini Thrusters and they worked Very well and have a lot of Thrust. (Even too much for me, i had to power them with a lower pwm Signal than the Maximum)
Also the Quality of the Product seems very good and I'm Happy with the Product (Despite they where quite expensive for my Budget.)
First I didn't know whether I could thrust the website of Apisqueen, so after a short Chat with Apisqueen, I ordered the Thrusters on Aliexpress where I have some Inscurances and a Money Back Guarantee. But If I had to buy a second time, I would buy them directly from the Apisqueen website.

