


















APISQUEEN U2 MINI 1.3Kg Underwater Thruster 16V 130W
U2 mini underwater thruster usage video tutorial (No ESC/With ESC):


Model: U2 mini
U2mini use environment: seawater/freshwater
Voltage: 12-16V (3-4S LiPo)
Max. current: 8A
Maximum power: 130W
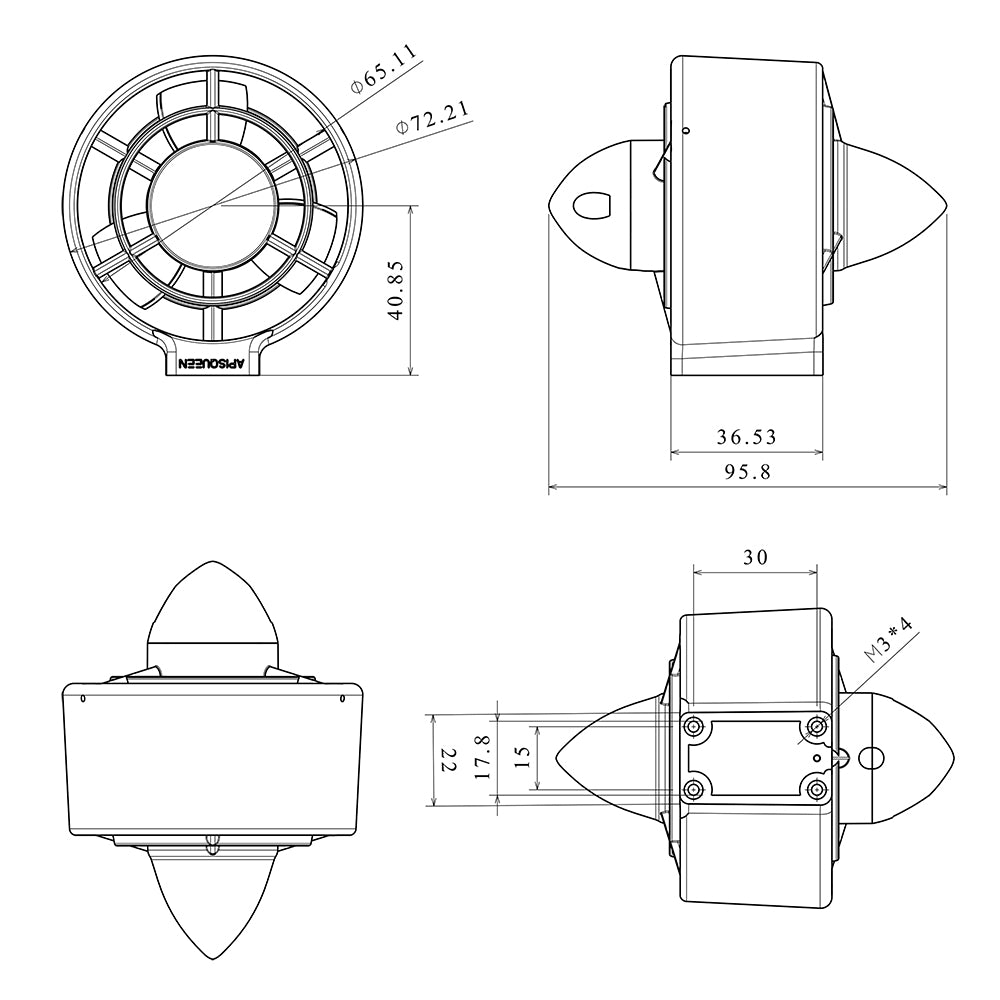
Size: 95.8*77mm
Cable length: >900mm
Weight: 210g
Wire diameter: 7mm
PWM:1-2ms,50HZ
APISQUEEN U2 mini Underwater Propulsion 3 D Drawing Download
Features:
1: U2 mini brushless underwater thruster one piece open mold, using composite materials, anti-corrosion and anti-oxidation, can be used in seawater environment.
2: U2 mini low power consumption, high efficiency.
3: U2 mini front and rear protective ribs, which can effectively block the entry of foreign objects.
4: the use of motor 500KV, high speed.
5: support up to 16V (4S LiPo).
DESCRIPTION OF THE UNDERWATER THRUSTERS CW AND CCW
How can I use a Raspberry Pi 4B to send a PWM signal to an ESC to control an underwater thruster?
Example code:
import pigpio
import time
pi = pigpio.pi() #create pigpio object
LED_PIN = 18 # Define the GPIO port to which the LED is connected.
PWM_FREQUENCY = 50 #define the PWM frequency in Hz
PWM_range = 1000
PWM_DUTYCYCLE = 0 # Define PWM duty cycle, value range 0 (2) 55,
pi.set_mode(LED_PIN, pigpio.OUTPUT) #Set the GPIO port to output mode
pi.set_PWM_frequency(LED_PIN, PWM_FREQUENCY) #set PWM frequency
pi.set_PWM_range(LED_PIN, PWM_range) # set range 1000
pi.set_PWM_dutycycle(LED_PIN, 75) # set PWM duty cycle 75/1000=7.5 per cent
time.sleep(3) # delay 3s unlock successful
pi.set_PWM_dutycycle(LED_PIN, 100)
# Positive rotation 7.5%-10% duty cycle, the larger the duty cycle, the faster the positive rotation speed
time.sleep(15)
pi.set_PWM_dutycycle(LED_PIN, 60)
# Reverse The closer the duty cycle is to 5%, the faster the reversal speed is
time.sleep(5)
pi.set_PWM_dutycycle(LED_PIN, 75)
# Duty cycle
time.sleep(5)

APISQUEEN U2/U2mini underwater thruster mounting base, can be purchased if necessary:APISQUEEN U2/U2mini underwater thruster mounting base

About points (lower right corner of the store page):
★5 points for every $1 spent;
★For every 100 points redeemed, you can get a $1.00 discount on the entire order;
Applicable to orders of any amount.How to use points:
1. Redeem in the smile panel.
2. Redeem at checkout.
Customer Reviews
APISQUEEN U2 MINI 1.3Kg Underwater Thruster 16V 130W
APISQUEEN U2 MINI 1.3Kg Underwater Thruster 16V 130W
you mom
I ordered U2 mini with built in esc, that should run at max speed as soon as I connect it to battery, but it does NOT!
I received two units that have to be speed controlled, so I had to program arduino, buy different cables and it is the opposite of simplicity, that I wanted. So I had to delay my project and I cannot write a review how they perform in water.
I am a Swiss High-Scool Student and as my final project, i built a ROV. For this Purpose I ordered 4 of the U2 Mini Thrusters and they worked Very well and have a lot of Thrust. (Even too much for me, i had to power them with a lower pwm Signal than the Maximum)
Also the Quality of the Product seems very good and I'm Happy with the Product (Despite they where quite expensive for my Budget.)
First I didn't know whether I could thrust the website of Apisqueen, so after a short Chat with Apisqueen, I ordered the Thrusters on Aliexpress where I have some Inscurances and a Money Back Guarantee. But If I had to buy a second time, I would buy them directly from the Apisqueen website.

