




















APISQUEEN U2 MINI 1,3 кг подводный гребной винт 16 В 130 Вт
Модель: U2 мини
Напряжение: 12-16 В (литиевая батарея 3-4S)
максимум. Ток: 8А
Максимальная мощность: 130 Вт
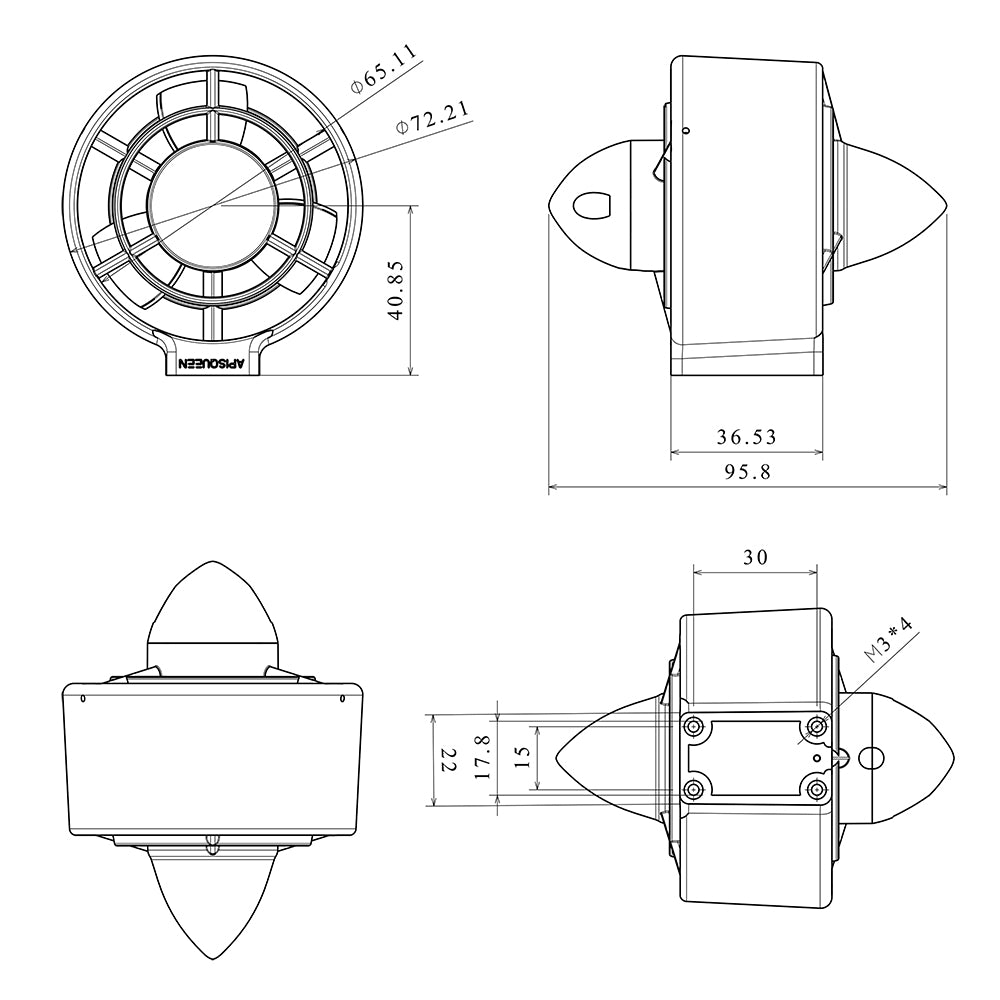
Размер: 95,8*77 мм
Длина кабеля:> 900 мм
Вес: 210 г
Диаметр проволоки: 7 мм
Широтно-импульсная модуляция: 1-2 мс, 50 Гц
Скачать 3D-чертеж подводной установки APISQUEEN U2 Mini
особенность:
1: Мини-бесщеточный подводный гребной винт U2 отлит в единое целое, изготовлен из композитных материалов, устойчив к коррозии и окислению и может использоваться в морской воде.
2: U2 mini имеет низкое энергопотребление и высокую эффективность.
3: Передние и задние защитные ребра U2 mini эффективно предотвращают попадание посторонних предметов.
4: Использование двигателя 500 кВ, высокая скорость.
5: поддерживает напряжение до 16 В (4S LiPo).
Как отправить сигнал ШИМ на ESC с помощью Raspberry Pi 4B для управления подводными двигателями?
Образец кода:
Импортная свинья
Время импорта
pi = pigpio.pi() #Создаем объект pigpio
LED_PIN = 18 # Определите порт GPIO, к которому подключен светодиод.
PWM_FREQUENCY = 50 #Определить частоту ШИМ, единица измерения Гц
Диапазон широтно-импульсной модуляции = 1000
PWM_DUTYCYCLE = 0 # Определить рабочий цикл ШИМ, диапазон значений 0 (2) 55,
pi.set_mode(LED_PIN, pigpio.OUTPUT) #Устанавливаем порт GPIO в режим вывода
pi.set_PWM_Frequency(LED_PIN, PWM_FREQUENCY) #Установить частоту ШИМ
pi.set_PWM_range(LED_PIN, PWM_range) # Установить диапазон 1000
pi.set_PWM_dutycycle(LED_PIN, 75) #Set рабочий цикл ШИМ 75/1000=7,5%
time.sleep(3) # Задержка 3 секунды для успешной разблокировки
pi.set_PWM_dutycycle(LED_PIN, 100)
# Рабочий цикл прямого вращения 7,5%-10%, чем больше рабочий цикл, тем выше скорость вращения вперед.
время.сон(15)
pi.set_PWM_dutycycle(LED_PIN, 60)
# Реверс Чем ближе рабочий цикл к 5%, тем быстрее будет скорость реверса.
время.сон(5)
pi.set_PWM_dutycycle(LED_PIN, 75)
#Рабочий цикл
время.сон(5)
Напряжение: 12-16 В (литиевая батарея 3-4S)
максимум. Ток: 8А
Максимальная мощность: 130 Вт
Размер: 95,8*77 мм
Длина кабеля:> 900 мм
Вес: 210 г
Диаметр проволоки: 7 мм
Широтно-импульсная модуляция: 1-2 мс, 50 Гц
Скачать 3D-чертеж подводной установки APISQUEEN U2 Mini
особенность:
1: Мини-бесщеточный подводный гребной винт U2 отлит в единое целое, изготовлен из композитных материалов, устойчив к коррозии и окислению и может использоваться в морской воде.
2: U2 mini имеет низкое энергопотребление и высокую эффективность.
3: Передние и задние защитные ребра U2 mini эффективно предотвращают попадание посторонних предметов.
4: Использование двигателя 500 кВ, высокая скорость.
5: поддерживает напряжение до 16 В (4S LiPo).
Как отправить сигнал ШИМ на ESC с помощью Raspberry Pi 4B для управления подводными двигателями?
Образец кода:
Импортная свинья
Время импорта
pi = pigpio.pi() #Создаем объект pigpio
LED_PIN = 18 # Определите порт GPIO, к которому подключен светодиод.
PWM_FREQUENCY = 50 #Определить частоту ШИМ, единица измерения Гц
Диапазон широтно-импульсной модуляции = 1000
PWM_DUTYCYCLE = 0 # Определить рабочий цикл ШИМ, диапазон значений 0 (2) 55,
pi.set_mode(LED_PIN, pigpio.OUTPUT) #Устанавливаем порт GPIO в режим вывода
pi.set_PWM_Frequency(LED_PIN, PWM_FREQUENCY) #Установить частоту ШИМ
pi.set_PWM_range(LED_PIN, PWM_range) # Установить диапазон 1000
pi.set_PWM_dutycycle(LED_PIN, 75) #Set рабочий цикл ШИМ 75/1000=7,5%
time.sleep(3) # Задержка 3 секунды для успешной разблокировки
pi.set_PWM_dutycycle(LED_PIN, 100)
# Рабочий цикл прямого вращения 7,5%-10%, чем больше рабочий цикл, тем выше скорость вращения вперед.
время.сон(15)
pi.set_PWM_dutycycle(LED_PIN, 60)
# Реверс Чем ближе рабочий цикл к 5%, тем быстрее будет скорость реверса.
время.сон(5)
pi.set_PWM_dutycycle(LED_PIN, 75)
#Рабочий цикл
время.сон(5)

Customer Reviews
Based on 1 review
100%
(1)
0%
(0)
0%
(0)
0%
(0)
0%
(0)
F
I am a Swiss High-Scool Student and as my final project, i built a ROV. For this Purpose I ordered 4 of the U2 Mini Thrusters and they worked Very well and have a lot of Thrust. (Even too much for me, i had to power them with a lower pwm Signal than the Maximum)
Also the Quality of the Product seems very good and I'm Happy with the Product (Despite they where quite expensive for my Budget.)
First I didn't know whether I could thrust the website of Apisqueen, so after a short Chat with Apisqueen, I ordered the Thrusters on Aliexpress where I have some Inscurances and a Money Back Guarantee. But If I had to buy a second time, I would buy them directly from the Apisqueen website.

