
























U40 3500W 40KG แรงขับ 12-50V ใต้น้ำก้นทะเลใบพัดใบพัดกันน้ำมอเตอร์แบบไม่มีแปรงสำหรับรีโมทคอนโทรลเหยื่อลากจูง Nest เรือดำน้ำ


รุ่น: U40
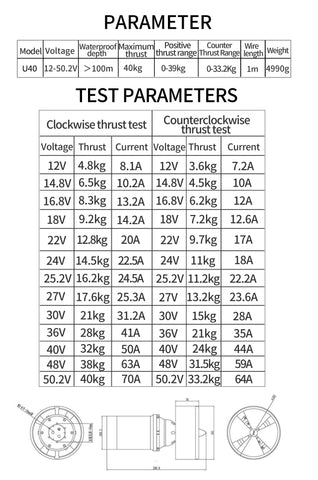
แรงดันไฟฟ้าขาเข้า: 12~50.2V (แบตเตอรี่ LiPo 3~12S)
กระแสไฟสูงสุด: 70A
แรงขับสูงสุด: 40 กก.
กำลังไฟ: 3000W
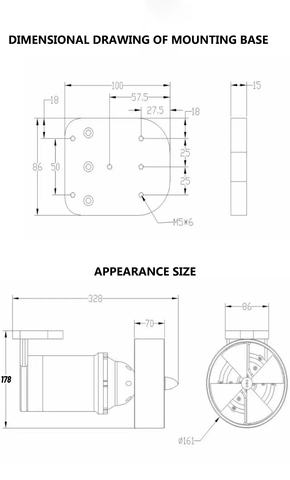
ขนาดมอเตอร์ขับเคลื่อน: 328*178 มม.
ขนาด ESC: 110 มม. x 69 มม. x 32 มม.
ความลึกในการดำน้ำ: 100 ม.
ความยาวสายไฟ: 1 ม.
น้ำหนัก (กรัม):
มอเตอร์ขับเคลื่อน: 6300 กรัม
ESC: 493 กรัม
ระยะควบคุมระยะไกล: 500 ม.
เราเป็นโรงงานต้นทาง โปรดติดต่อเราเพื่อซื้อ/ปรับแต่งจำนวนมาก: lynn@underwaterthruster.com
สภาพแวดล้อมการใช้งาน U40: น้ำทะเล/น้ำจืด
คำอธิบายการขับเคลื่อนใต้น้ำ CW และ CCW:
3500W 40KG แรงขับ 12-50V ทรัสเตอร์ใต้ทะเลใต้น้ำ
เกี่ยวกับพีเอ็มดับเบิลยู
ชื่อเต็มของ PWM คือ (การปรับความกว้างพัลส์) เรียกอีกอย่างว่าสัญญาณรอบหน้าที่ ซึ่งแสดงถึงสัดส่วนของระยะเวลาระดับสูงต่อรอบสัญญาณทั้งหมด ระยะเวลา PWM ทั้งหมดคือ 2ms หยุดที่ 1.5ms ไปข้างหน้าที่ 1.5-2ms และย้อนกลับที่ 1.5-1ms
จากรูปเราจะเห็นได้ชัดเจนว่าเมื่อ PWM อยู่ที่ 75% (1.5ms) มอเตอร์จะหยุดหมุน เมื่อ PWM อยู่ที่ 50% (1ms) มอเตอร์จะหมุนในทิศทางตรงกันข้าม และเมื่อ PWM เป็น 100% ( 2ms) มอเตอร์หยุดหมุน แน่นอนว่า ESC ไม่เพียงแต่ทำให้มอเตอร์หมุนไปข้างหน้าและถอยหลังเท่านั้น แต่ยังปรับความเร็วของมอเตอร์ผ่านรอบการทำงานของ PWM อีกด้วย เมื่อ PWM ค่อยๆ เปลี่ยนจาก 75% เป็น 50% มอเตอร์จะเดินหน้าต่อไปและเร่งความเร็วจากหยุดจนกว่าการถอยหลังจะถึงระดับสูงสุด เมื่อ PWM ค่อยๆ เปลี่ยนจาก 75% เป็น 100% มอเตอร์จะเร่งความเร็วต่อไปจากการหมุนหยุดไปข้างหน้าจนกระทั่งการหมุนไปข้างหน้าถึงค่าสูงสุด นั่นคือ PWM เป็นสัญญาณที่สามารถเปลี่ยนแปลงได้อย่างต่อเนื่อง และช่วงที่มีประสิทธิภาพคือ 50%~100%
ความถี่ของสัญญาณ PWM คือ 50hz, 100hz, 200hz หรือ 500hz เป็นต้น ยิ่งความถี่ในการควบคุมสูง ระยะเวลาที่สั้นลง ช่วงเวลาการควบคุมก็จะสั้นลง และความเร็วการตอบสนองของ ESC และมอเตอร์ก็จะยิ่งเร็วขึ้น ยิ่ง ESC และมอเตอร์ตอบสนองได้เร็วเท่าไร ในทางตรงกันข้าม ยิ่งความถี่ในการควบคุมต่ำ ระยะเวลาในการควบคุมก็จะยิ่งนานขึ้น และการตอบสนองของ ESC และมอเตอร์ก็จะยิ่งช้าลง
เกี่ยวกับคะแนน (มุมล่างขวาของหน้าร้านค้า):
★รับ 5 คะแนนสำหรับทุกๆ 1 ดอลลาร์ที่ใช้ไป
★รับ $1.00 จากการสั่งซื้อทั้งหมดของคุณสำหรับทุก ๆ 100 คะแนนที่แลก
ใช้กับคำสั่งซื้อจำนวนเท่าใดก็ได้
วิธีใช้คะแนน:
1. แลกได้ที่แผงยิ้ม
2. แลกเมื่อชำระเงิน