














APISQUEEN 24V 100A Feather ESC เคสโลหะพร้อมพัดลมระบายความร้อนในตัวพร้อม BEC 5.5V 3A สำหรับเครื่องขับเคลื่อนใต้น้ำและมอเตอร์
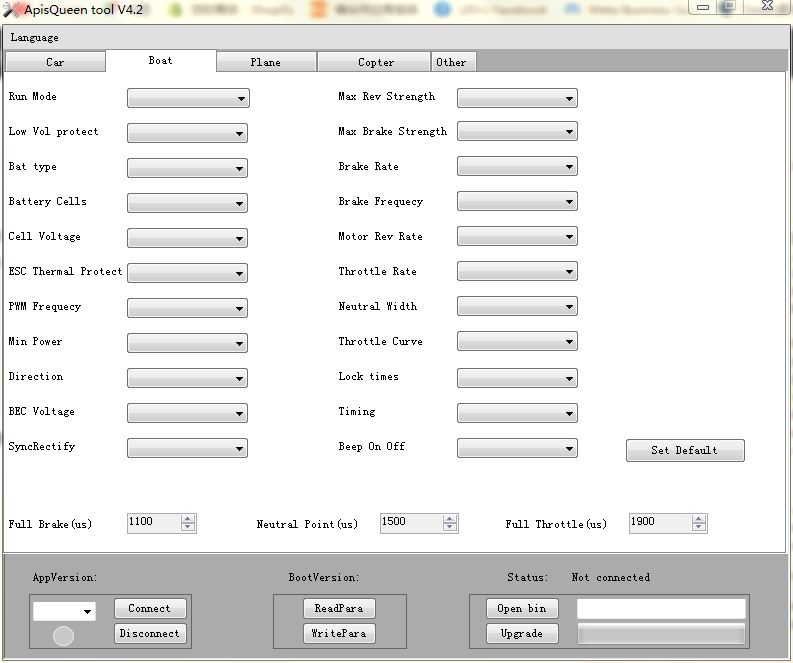
วิธีการเชื่อมต่อซอฟต์แวร์บอร์ดอ้างอิงและคำอธิบายพารามิเตอร์:
แรงดันไฟฟ้าที่รองรับ: 24V (รองรับสูงสุด 29.2V)
น้ำหนัก: 230g
กระแสไฟต่อเนื่อง: 100A
โหมดการทำงาน: ทิศทางสองทาง
BEC: 5.5V 3A
1. การป้องกันหลายแบบ: การป้องกันแรงดันต่ำ การป้องกันอุณหภูมิเกิน การป้องกันการสูญเสียพลังงาน ฯลฯ
2. เฟิร์มแวร์เฉพาะของ APISQUEEN ประสิทธิภาพที่สูงขึ้น เมื่อคันเร่งเปลี่ยนจากขนาดใหญ่เป็นขนาดเล็ก การตอบสนองการลดความเร็วของตัวขับจะเร็วขึ้น
3. ความเสถียรและความยืดหยุ่นของตัวขับได้รับการปรับปรุงอย่างมีนัยสำคัญ และสัญญาณคันเร่งจะตรวจพบโดยอัตโนมัติหลังจากเปิด ESC
4. รองรับโหมดคันเร่ง PWM ทั่วไป อินพุตความกว้างพัลส์ 1-2ms Oneshot และ Multishot รองรับ Dshot150, Dshot300 และ Dshot600 Dshot เป็นสัญญาณดิจิทัล
5. ความสามารถในการป้องกันการรบกวนที่แข็งแกร่ง ESC ไม่จำเป็นต้องปรับเทียบสัญญาณการเคลื่อนที่ของคันเร่ง;
6. ซอฟต์แวร์ปรับพารามิเตอร์คอมพิวเตอร์ระดับมืออาชีพ การแสดงภาพการปรับพารามิเตอร์;
7. ESC ใช้เปลือกโลหะและพัดลมระบายความร้อนในตัวเพื่อกระจายความร้อนอย่างมีประสิทธิภาพเพื่อให้แน่ใจว่า ESC ทำงานได้อย่างเสถียรและปรับปรุงประสิทธิภาพ

ลิงค์ดาวน์โหลดซอฟต์แวร์ (คลิกลิงค์เพื่อดาวน์โหลด): https://cdn.shopifycdn.net/s/files/1/0621/5493/2452/files/ApisQueen_tool.zip?v=1677690776
[หากคุณไม่พบพอร์ต COM คุณต้องดาวน์โหลดและติดตั้งไดรเวอร์ Ch340 หรือ Ch341 ใช้ USB เพื่อเชื่อมต่อคอมพิวเตอร์และสายสัญญาณ ESC คลิก "เครื่องมือ" เลือก "พอร์ต COM" คลิก "เชื่อมต่อ" จากนั้นเปิด ESC หลังจากยืนยันว่าการเชื่อมต่อสำเร็จแล้ว ให้คลิก "Readpara" เพื่ออ่านพารามิเตอร์ แก้ไขพารามิเตอร์ที่เกี่ยวข้อง และคลิก "Writepara" เพื่อเขียนและบันทึก ]
เกี่ยวกับ PWM
PWM ย่อมาจาก (Pulse-width Modulation) หรือที่รู้จักกันในชื่อสัญญาณรอบหน้าที่ ซึ่งระบุสัดส่วนของระยะเวลาระดับสูงต่อรอบสัญญาณทั้งหมด รอบหน้าที่ของ PWM คือ 2 มิลลิวินาที 1.5 มิลลิวินาทีคือหยุด 1.5-2 มิลลิวินาทีคือเดินหน้า และ 1.5-1 มิลลิวินาทีคือถอยหลัง
จากรูปจะเห็นได้ชัดเจนว่าเมื่อ PWM อยู่ที่ 75% (1.5 มิลลิวินาที) มอเตอร์จะหยุดหมุน เมื่อ PWM อยู่ที่ 50% (1 มิลลิวินาที) มอเตอร์จะถอยหลัง เมื่อ PWM อยู่ที่ 100% (2 มิลลิวินาที) มอเตอร์จะหมุนไปข้างหน้า แน่นอนว่า ESC ไม่เพียงแต่ควบคุมการหมุนไปข้างหน้าและถอยหลังของมอเตอร์ได้เท่านั้น แต่ยังปรับความเร็วของมอเตอร์ได้ตามขนาดของรอบหน้าที่ของ PWM อีกด้วย เมื่อ PWM ค่อยๆ เปลี่ยนจาก 75% เป็น 50% มอเตอร์จะเดินหน้าถอยหลังและเร่งความเร็วจากสถานะหยุดนิ่งจนกระทั่งความเร็วถอยหลังถึงค่าสูงสุด เมื่อ PWM ค่อยๆ เปลี่ยนจาก 75% เป็น 100% มอเตอร์จะเดินหน้าถอยหลังจากสถานะหยุดนิ่งไปยังการหมุนไปข้างหน้าจนกระทั่งความเร็วเดินหน้าถึงค่าสูงสุด กล่าวอีกนัยหนึ่ง PWM คือสัญญาณที่สามารถเปลี่ยนแปลงได้อย่างต่อเนื่อง และช่วงที่มีผลคือ 50% ถึง 100%
ความถี่ของสัญญาณ PWM คือ 50Hz, 100Hz, 200Hz หรือ 500Hz ยิ่งความถี่ควบคุมสูงขึ้น รอบการทำงานก็จะสั้นลง และช่วงการควบคุมก็จะสั้นลง ความเร็วตอบสนองของ ESC และมอเตอร์ก็จะเร็วขึ้น ในทางตรงกันข้าม ยิ่งความถี่ควบคุมต่ำลง รอบการทำงานก็จะยาวขึ้น และช่วงการควบคุมก็จะยาวขึ้น ความเร็วตอบสนองของ ESC และมอเตอร์ก็จะช้าลง
แรงดันไฟฟ้าที่รองรับ: 24V (รองรับสูงสุด 29.2V)
น้ำหนัก: 230g
กระแสไฟต่อเนื่อง: 100A
โหมดการทำงาน: ทิศทางสองทาง
BEC: 5.5V 3A
1. การป้องกันหลายแบบ: การป้องกันแรงดันต่ำ การป้องกันอุณหภูมิเกิน การป้องกันการสูญเสียพลังงาน ฯลฯ
2. เฟิร์มแวร์เฉพาะของ APISQUEEN ประสิทธิภาพที่สูงขึ้น เมื่อคันเร่งเปลี่ยนจากขนาดใหญ่เป็นขนาดเล็ก การตอบสนองการลดความเร็วของตัวขับจะเร็วขึ้น
3. ความเสถียรและความยืดหยุ่นของตัวขับได้รับการปรับปรุงอย่างมีนัยสำคัญ และสัญญาณคันเร่งจะตรวจพบโดยอัตโนมัติหลังจากเปิด ESC
4. รองรับโหมดคันเร่ง PWM ทั่วไป อินพุตความกว้างพัลส์ 1-2ms Oneshot และ Multishot รองรับ Dshot150, Dshot300 และ Dshot600 Dshot เป็นสัญญาณดิจิทัล
5. ความสามารถในการป้องกันการรบกวนที่แข็งแกร่ง ESC ไม่จำเป็นต้องปรับเทียบสัญญาณการเคลื่อนที่ของคันเร่ง;
6. ซอฟต์แวร์ปรับพารามิเตอร์คอมพิวเตอร์ระดับมืออาชีพ การแสดงภาพการปรับพารามิเตอร์;
7. ESC ใช้เปลือกโลหะและพัดลมระบายความร้อนในตัวเพื่อกระจายความร้อนอย่างมีประสิทธิภาพเพื่อให้แน่ใจว่า ESC ทำงานได้อย่างเสถียรและปรับปรุงประสิทธิภาพ
ลิงค์ดาวน์โหลดซอฟต์แวร์ (คลิกลิงค์เพื่อดาวน์โหลด): https://cdn.shopifycdn.net/s/files/1/0621/5493/2452/files/ApisQueen_tool.zip?v=1677690776
[หากคุณไม่พบพอร์ต COM คุณต้องดาวน์โหลดและติดตั้งไดรเวอร์ Ch340 หรือ Ch341 ใช้ USB เพื่อเชื่อมต่อคอมพิวเตอร์และสายสัญญาณ ESC คลิก "เครื่องมือ" เลือก "พอร์ต COM" คลิก "เชื่อมต่อ" จากนั้นเปิด ESC หลังจากยืนยันว่าการเชื่อมต่อสำเร็จแล้ว ให้คลิก "Readpara" เพื่ออ่านพารามิเตอร์ แก้ไขพารามิเตอร์ที่เกี่ยวข้อง และคลิก "Writepara" เพื่อเขียนและบันทึก ]
เกี่ยวกับ PWM
PWM ย่อมาจาก (Pulse-width Modulation) หรือที่รู้จักกันในชื่อสัญญาณรอบหน้าที่ ซึ่งระบุสัดส่วนของระยะเวลาระดับสูงต่อรอบสัญญาณทั้งหมด รอบหน้าที่ของ PWM คือ 2 มิลลิวินาที 1.5 มิลลิวินาทีคือหยุด 1.5-2 มิลลิวินาทีคือเดินหน้า และ 1.5-1 มิลลิวินาทีคือถอยหลัง
จากรูปจะเห็นได้ชัดเจนว่าเมื่อ PWM อยู่ที่ 75% (1.5 มิลลิวินาที) มอเตอร์จะหยุดหมุน เมื่อ PWM อยู่ที่ 50% (1 มิลลิวินาที) มอเตอร์จะถอยหลัง เมื่อ PWM อยู่ที่ 100% (2 มิลลิวินาที) มอเตอร์จะหมุนไปข้างหน้า แน่นอนว่า ESC ไม่เพียงแต่ควบคุมการหมุนไปข้างหน้าและถอยหลังของมอเตอร์ได้เท่านั้น แต่ยังปรับความเร็วของมอเตอร์ได้ตามขนาดของรอบหน้าที่ของ PWM อีกด้วย เมื่อ PWM ค่อยๆ เปลี่ยนจาก 75% เป็น 50% มอเตอร์จะเดินหน้าถอยหลังและเร่งความเร็วจากสถานะหยุดนิ่งจนกระทั่งความเร็วถอยหลังถึงค่าสูงสุด เมื่อ PWM ค่อยๆ เปลี่ยนจาก 75% เป็น 100% มอเตอร์จะเดินหน้าถอยหลังจากสถานะหยุดนิ่งไปยังการหมุนไปข้างหน้าจนกระทั่งความเร็วเดินหน้าถึงค่าสูงสุด กล่าวอีกนัยหนึ่ง PWM คือสัญญาณที่สามารถเปลี่ยนแปลงได้อย่างต่อเนื่อง และช่วงที่มีผลคือ 50% ถึง 100%
ความถี่ของสัญญาณ PWM คือ 50Hz, 100Hz, 200Hz หรือ 500Hz ยิ่งความถี่ควบคุมสูงขึ้น รอบการทำงานก็จะสั้นลง และช่วงการควบคุมก็จะสั้นลง ความเร็วตอบสนองของ ESC และมอเตอร์ก็จะเร็วขึ้น ในทางตรงกันข้าม ยิ่งความถี่ควบคุมต่ำลง รอบการทำงานก็จะยาวขึ้น และช่วงการควบคุมก็จะยาวขึ้น ความเร็วตอบสนองของ ESC และมอเตอร์ก็จะช้าลง