


















APISQUEEN U2 MINI 1.3Kg 水中プロペラ プロペラ 16V 130W
U2 ミニ水中スラスター ユーザーガイド (ESC あり/なし):
ポイントについて(ストアページ右下):
★1ドルのお支払いごとに5ポイントを獲得します。
★100 ポイントを引き換えるごとに、ご注文全体から $1.00 割引を獲得します。
いかなる金額のご注文にも適用されます。
ポイントの使用方法:
1. スマイルパネルで引き換えます。
2. チェックアウト時に引き換えます。


モデル: U2 ミニ
U2mini使用環境:海水/淡水
電圧: 12-16V (3-4S リチウム電池)
最大。 電流: 8A
最大電力: 130W
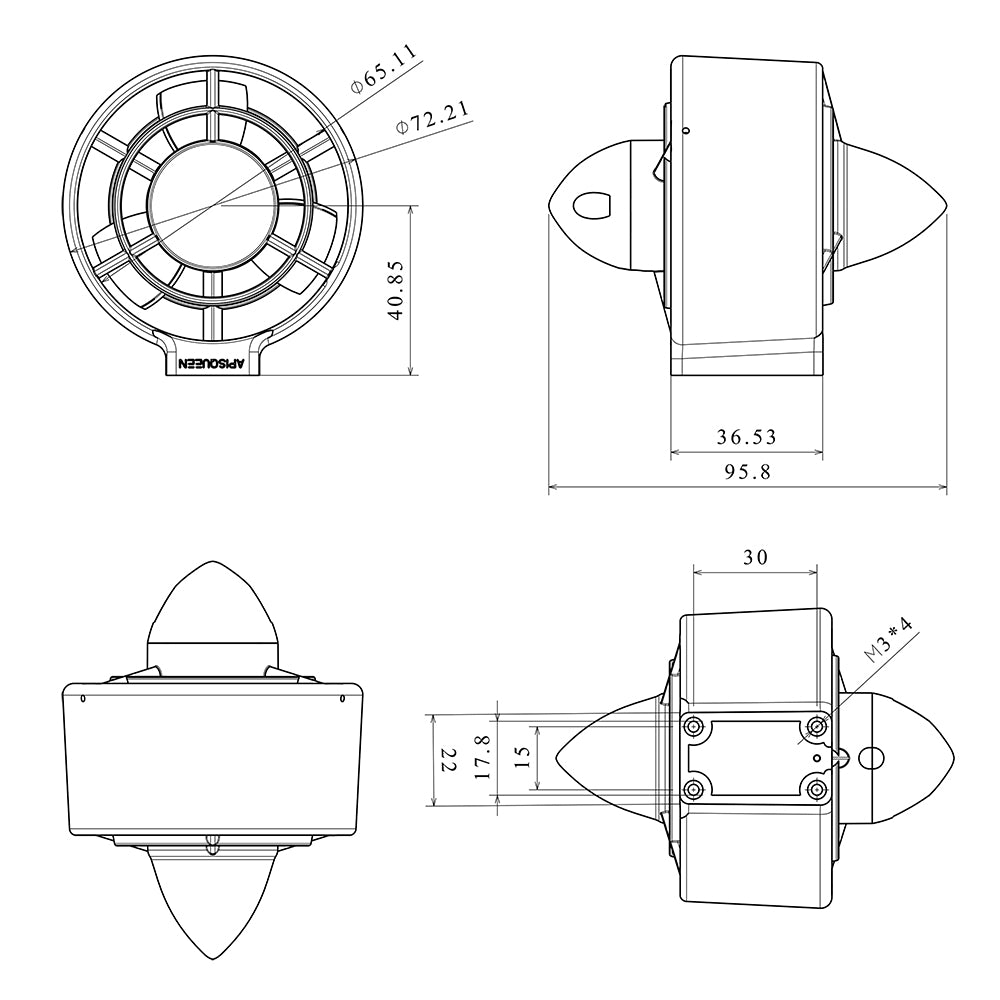
サイズ: 95.8*77mm
ケーブル長:>900mm
重量: 210g
線径:7mm
パルス幅変調: 1-2ms、50HZ
APISQUEEN U2 ミニ水中推進 3D 図面のダウンロード
特徴:
1: U2 ミニブラシレス水中プロペラは一体成型されており、複合材料で作られており、耐腐食性と抗酸化性があり、海水環境でも使用できます。
2: U2 mini は低消費電力かつ高効率です。
3:U2ミニの前後保護リブは異物の侵入を効果的に防ぎます。
4: モーター 500KV を使用し、高速。
5: 最大 16V (4S LiPo) をサポートします。
Raspberry Pi 4B を使用して PWM 信号を ESC に送信して水中スラスターを制御するにはどうすればよいですか?
サンプルコード:
輸入豚
インポート時間
pi = pigpio.pi() #pigpio オブジェクトを作成する
LED_PIN = 18 # LED が接続される GPIO ポートを定義します。
PWM_FREQUENCY = 50 #PWM 周波数を定義します (単位 Hz)
パルス幅変調範囲 = 1000
PWM_DUTYCYCLE = 0 # PWM デューティ サイクルを定義します。値の範囲は 0 (2) 55、
pi.set_mode(LED_PIN, pigpio.OUTPUT) #GPIO ポートを出力モードに設定します
pi.set_PWM_Frequency(LED_PIN, PWM_FREQUENCY) #PWM 周波数を設定
pi.set_PWM_range(LED_PIN, PWM_range) # 設定範囲 1000
pi.set_PWM_dutycycle(LED_PIN, 75) #PWM デューティ サイクルを設定 75/1000=7.5%
time.sleep(3) # ロックを正常に解除するには 3 秒遅延します
pi.set_PWM_dutycycle(LED_PIN, 100)
#正転 7.5%-10% デューティサイクル、デューティサイクルが大きいほど、正転速度が速くなります
タイムスリープ(15)
pi.set_PWM_dutycycle(LED_PIN, 60)
# リバース デューティサイクルが 5% に近づくほど、反転速度は速くなります。
タイムスリープ(5)
pi.set_PWM_dutycycle(LED_PIN, 75)
#デューティサイクル
タイムスリープ(5)

よくある質問:
カスタマイズについて
カスタマイズ サービスには、スラスター、モーター、ESC のあらゆる面でのカスタマイズが含まれます。
カスタマイズが必要な場合は、APISQUEEN (lynn@underwaterthruster.com) までお問い合わせください。
料金について
製品の価格と配送料には関税は含まれていません。関税の請求方法は国ごとに異なり、購入者は商品を受け取るときに関税を支払う必要があります(たとえば、米国の地域関税政策:800ドルまでの購入には関税はかかりません)。
1. 一部の国/地域からの国際輸入には、特定の材料の通関が必要な場合があります (必要に応じて、お客様にプロフォーマインボイスを提供します)。
2. お客様が通関にご協力いただけなかったために商品が返品された場合、送料は受取人の負担となります。
3. 税関で必要な場合は、消費量リストと証明書を提供できます。
4.製品が買い手の理由により返品された場合、買い手は送料を負担し、費用は選択した速達便に依存します。当社の過失により商品が破損または間違っていた場合、APISQUEEN がすべての費用を負担します。
5. 私たちが税関に申告する製品の価値は、買い手が実際に支払った注文金額の 10% であるため、買い手は一般的に関税をほとんど支払いません。
配送について
世界中のほぼすべての国に発送できます。ただし、一部の国では輸入制限があるので注意が必要です。
在庫がある場合:商品は購入者の支払い後1〜3営業日以内に発送されます。
在庫がない場合:商品は購入者の支払い後3〜20営業日以内に発送されます。
または、住所情報の確認が必要な場合など、その他の問題によりお届けが遅れる場合もございますが、より早く商品を発送できるよう、タイムリーにフォローアップさせていただきますので、ご安心ください。
1.商品は通常、購入者の所在地に応じて、DHL、FedEx、UPS、専用線などを使用して輸送されます。
2. 目的地への標準速達時間は通常 3 ~ 12 日 (他の特別な事情がない場合)、遠隔地の国/地域への配達時間は通常 10 ~ 20 日です。その他のニーズ(指定速達、関税額申告など)がある場合は、ご要望にお応えできるよう、ご注文後にご連絡ください。
3. APISQUEEN は、購入者の購入コストを削減するために、さまざまな国/地域に応じて配送料を設定し、購入者の送料の 50% を負担します。
4. 輸送料金は商品の重量に基づいて請求され、決済時に表示される運賃は APISQUEEN が 50% 負担する結果となります。
5. 以下の手順で送料を見積もることができます。購入したい商品を選択→カートに追加→配送先住所の郵便番号を入力→配送方法を選択→すると、見積送料が表示されます。
6.お急ぎの場合は、ご希望の時間に間に合うようにご注文前にお問い合わせください。
アフターサービスについて
1. 製品の発送前であれば注文をキャンセルして、全額(送料を含む)を返金することができます。商品の発送後、購入者が自分の理由(例:欲しくない、間違った商品を購入したなど)で返金を要求した場合、購入者は速達料金と商品返品の費用を負担する必要があります。その後、返品された商品を購入者に返金いたします。
2. 輸送中にパッケージが破損していることが判明した場合は、商品到着後5日以内に当社(Lynn@underwaterthruster.com)までご連絡いただき、商品の写真またはビデオを提供してください。1〜3日以内に返信させていただきます。実際の状況に応じて営業日以内にご満足いただけるよう対応いたします。
3. 商品を受け取った後に購入した商品を交換する必要がある場合は、商品を購入して受領書を確認してから6か月以内に商品をAPISQUEENに郵送する必要があります。製品に品質上の問題がある場合は、無料で対応します。 - 購入者向けの販売サービスと無料交換。新しいアクセサリーまたは新しい製品を自宅に郵送します(購入者は速達の送料のみを負担する必要があります。APISQUEEN は購入者の送料の 50% を負担しなくなりましたが、購入者に次のことを要求します)。送料は100%負担いたします)
APISQUEEN は、以下の場合にはアフターサービスを拒否します。
1. 製品の品質上の問題ではない故障および損傷。
2. 回路改造やマッチング不良による破損。
3. 不正な改造または分解によって生じた損傷。
4. 不適切な取り付けまたは使用によって生じた損傷。
5. 海水で使用した後、真水での洗浄を適時に行わないと、製品の寿命が短くなります。
すべての商品は「品質に問題がある場合を除き、返品・交換は受け付けません」。当社の製品を購入すると、このポリシーに同意したことになります。
Customer Reviews
APISQUEEN U2 MINI 1.3Kg Underwater Thruster 16V 130W
APISQUEEN U2 MINI 1.3Kg Underwater Thruster 16V 130W
you mom
I ordered U2 mini with built in esc, that should run at max speed as soon as I connect it to battery, but it does NOT!
I received two units that have to be speed controlled, so I had to program arduino, buy different cables and it is the opposite of simplicity, that I wanted. So I had to delay my project and I cannot write a review how they perform in water.
I am a Swiss High-Scool Student and as my final project, i built a ROV. For this Purpose I ordered 4 of the U2 Mini Thrusters and they worked Very well and have a lot of Thrust. (Even too much for me, i had to power them with a lower pwm Signal than the Maximum)
Also the Quality of the Product seems very good and I'm Happy with the Product (Despite they where quite expensive for my Budget.)
First I didn't know whether I could thrust the website of Apisqueen, so after a short Chat with Apisqueen, I ordered the Thrusters on Aliexpress where I have some Inscurances and a Money Back Guarantee. But If I had to buy a second time, I would buy them directly from the Apisqueen website.

